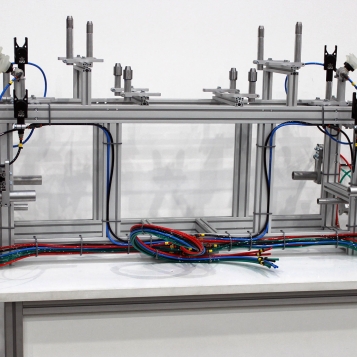
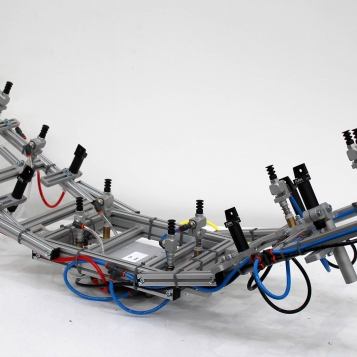
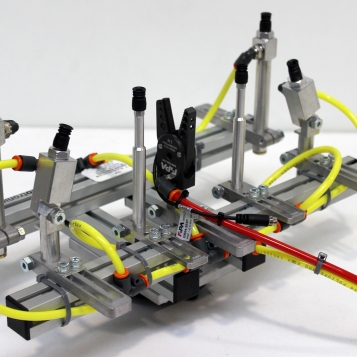
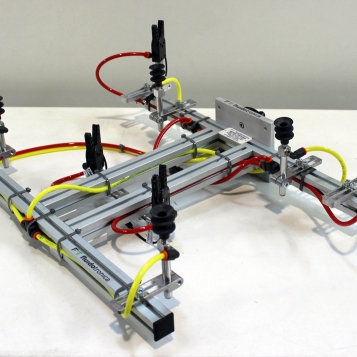
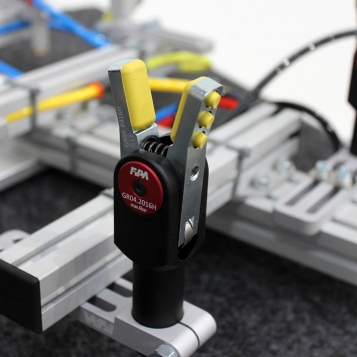
Mãos Presas.
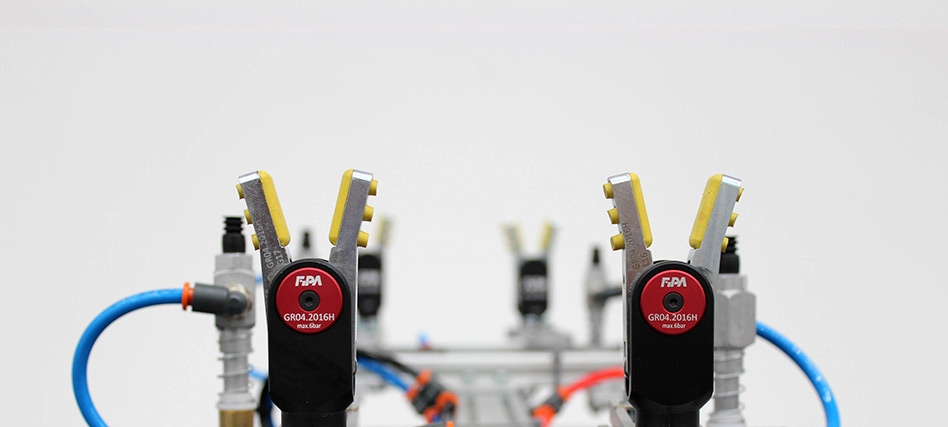
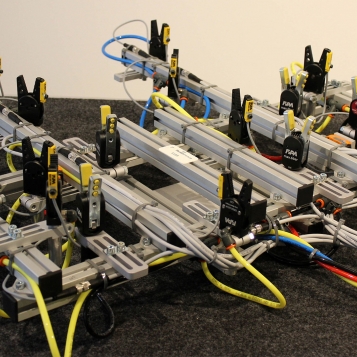
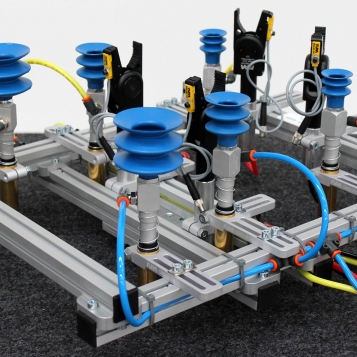
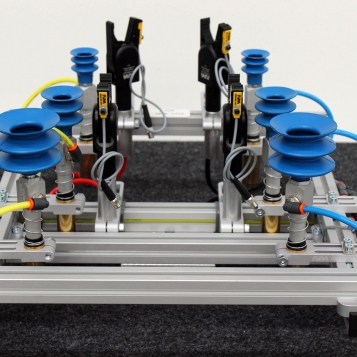
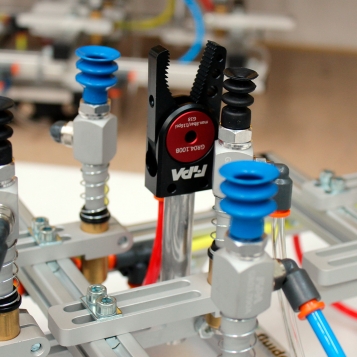
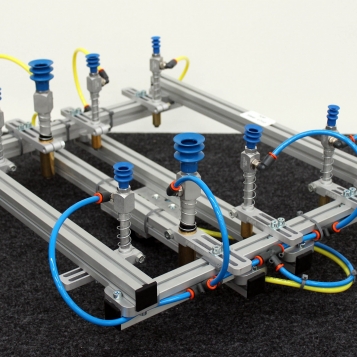
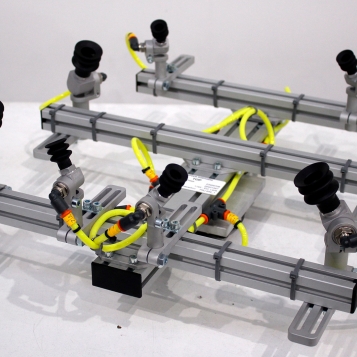
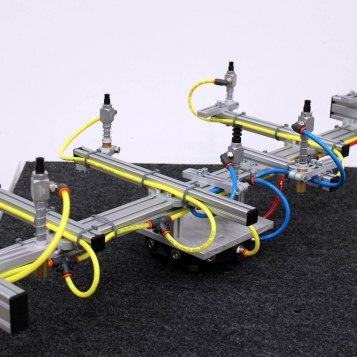
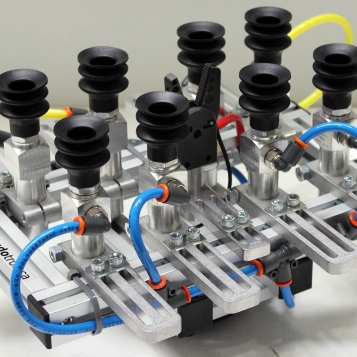
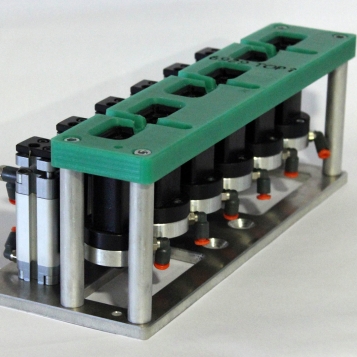
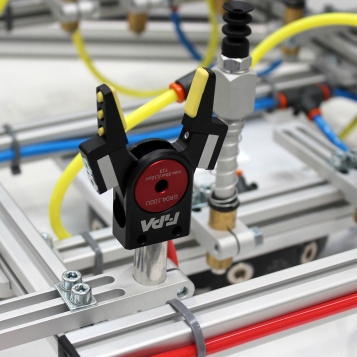
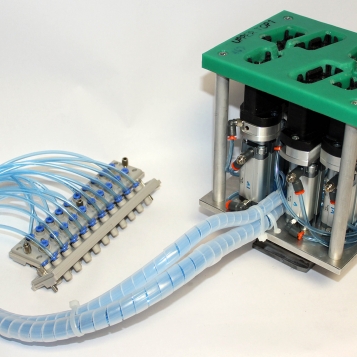
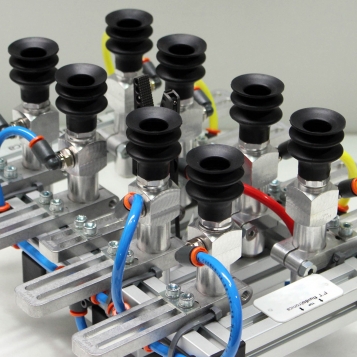
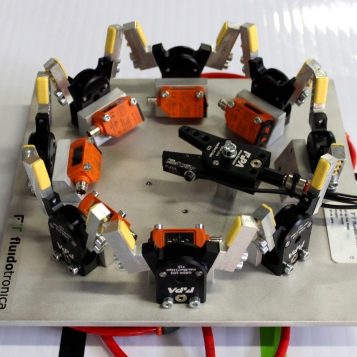
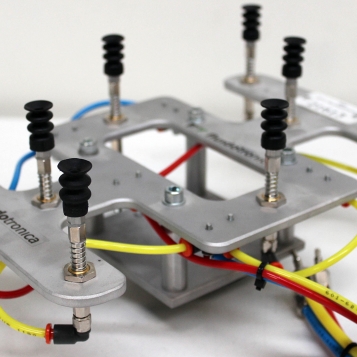
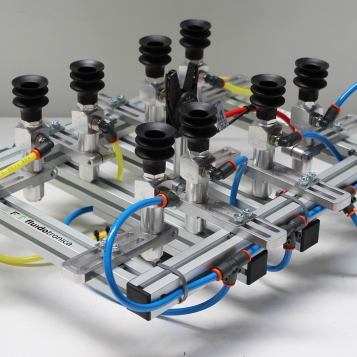
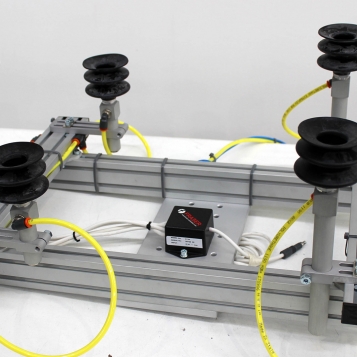
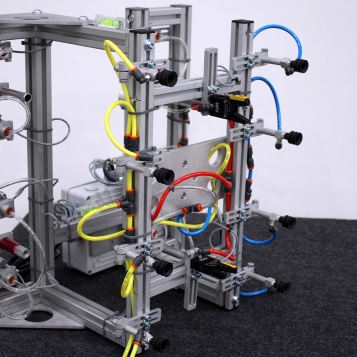
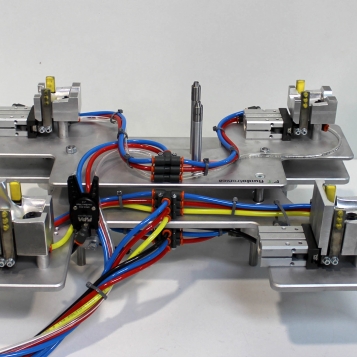
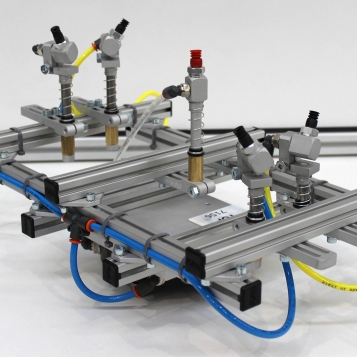
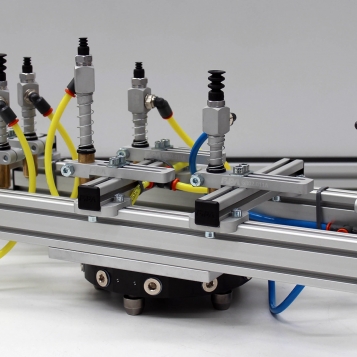
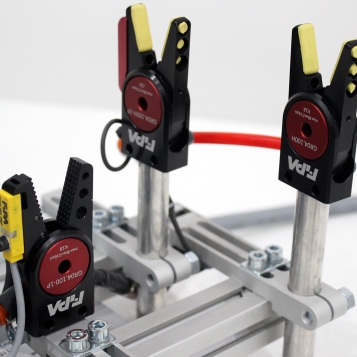
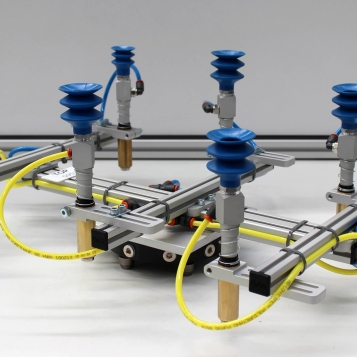
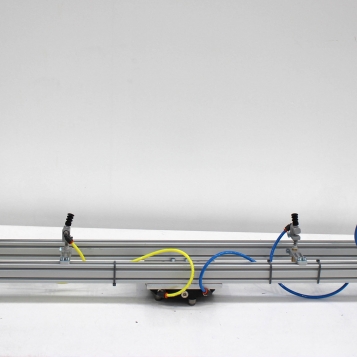
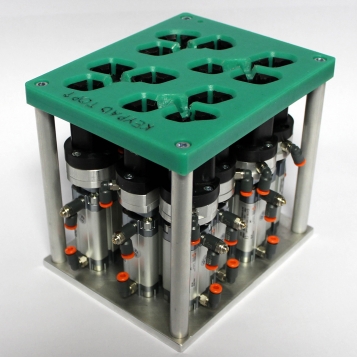
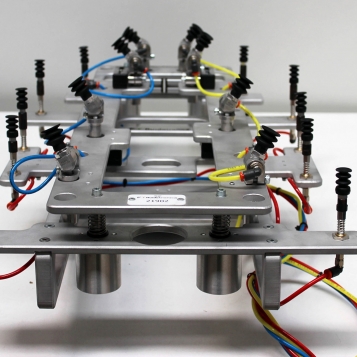
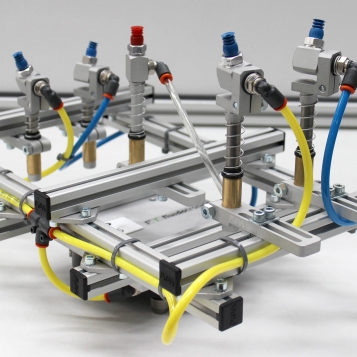
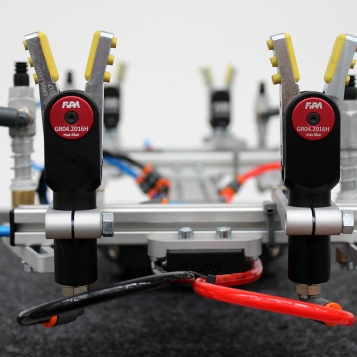
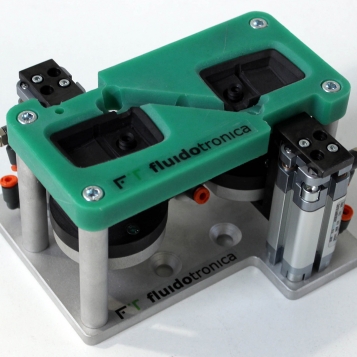
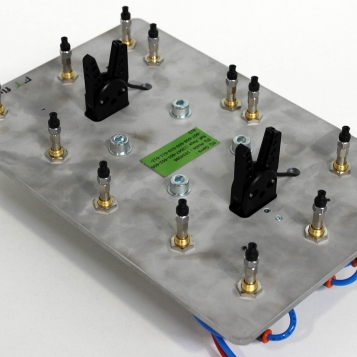
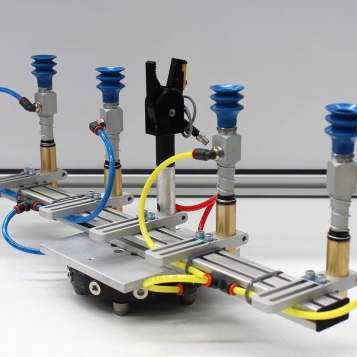
As mãos presas (End of Arm Tooling - EOAT, em inglês) referem-se a qualquer dispositivo que esteja anexado ao final do braço do robô. São elas que permitem ao robô interagir com peças e auxiliar na conclusão de uma tarefa. As mãos presas variam muito consoante as aplicações a que se destinam, bem como o tipo de peças que irão manipular e as ações que devem executar.
A grande vantagem de desenvolver as suas mãos presas (sistemas de garras completos) com a Fluidotronica reside no facto de poder encontrar tudo num único local: planeamento, projeto, construção, instalação, acompanhamento no arranque e serviço pós-venda.
VANTAGENS
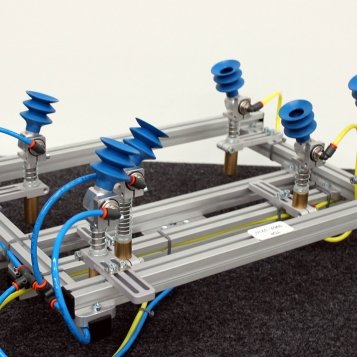
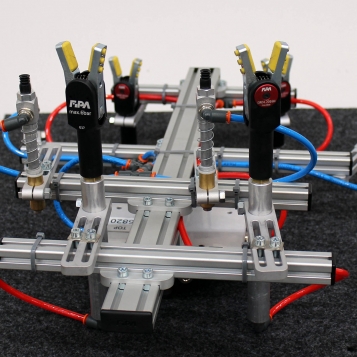
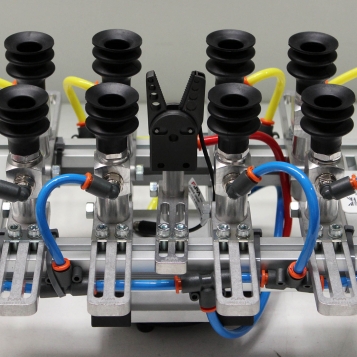
As mãos presas Fluidotronica são projetadas e construídas para sua aplicação específica para maior velocidade e precisão. A construção robusta e o uso de componentes de alta qualidade garantem uma vida útil e baixa manutenção.
. Colocação precisa
. Consistência do ciclo
. Proteção de Moldes / Manipulação suave de produtos
. Melhor qualidade da peça
. Tempo reduzido de manutenção / Tempo de atividade elevado
. Versatilidade adicional
. Aumento da fiabilidade do sistema
. Redução de custos de produção
. Problemas ergonómicos reduzidos
. Flexibilidade – a ferramenta pode ser personalizada para atender às necessidades específicas do sistema
ÁREAS PRINCIPAIS DE UTILIZAÇÃO
. Imprensa / Estampagem
. Soldadura
. Montagem
. Moldagem por injeção de plástico
. Logística
FUNÇÕES
. Seleção de peças
. Inserção a carga (incluindo alta tolerância)
. Confirmação de peça (confirmação de vácuo ou pinça)
. IMD (in-mold decorating) / IML (in-mold labeling) (carregamento direto ou remoto)
. Função dupla e função tripla (escolha e colocação)
APLICAÇÕES PARA AS MÃOS PRESAS
. Paletização / Despaletização
. Manipulação de peças e jitos
. Manipulação de paletes
. Manipulação de componentes de precisão
. Manipulação de cargas pesadas
. Sistemas automáticos de troca de ferramentas
. Corte de jitos
Consulte-nos para desenvolver as suas aplicações!